
|
Email / Google Scholar / LinkedIn / GitHub |
|
Graduating 2026. Seeking full-time roles in robotics and AI starting summer 2026. I am a PhD candidate at the MIT Computer Science & Artificial Intelligence Lab (CSAIL), advised by Daniela Rus. My research lies at the intersection of robotics, materials, and machine learning. I aim to develop physically intelligent robots by leveraging advanced manufacturing techniques and data-driven methods for sensing, modeling, and control. My work has been published in top academic journals like Nature and Science Advances and at leading robotics venues like IJRR, ICRA, IROS, CoRL, and RA-L. Previously, I earned a master's degree in electrical engineering and computer science from MIT and a master's and a bachelor's degree in mechanical engineering from ETH Zürich. At ETH, I worked with Dirk Mohr on machine learning-based modeling of mechanical material behavior. I spent a summer working at the asset management company Vanguard, where I explored the use of artificial intelligence and large language models in finance. I also interned at Symbotic, a robotic warehouse automation company, where I developed computer vision models for a collision avoidance system. |
|
(* indicates equal contribution) |

|
Annan Zhang, Hanna Matusik, Miguel Flores-Acton, Emily R. Sologuren, Joshua Jacob, Daniela Rus 2026 IEEE 9th International Conference on Soft Robotics (RoboSoft), Best Paper Award Finalist Preprint / BibTeX We embed air channels into 3D-printed helicoids to create sensorized segments for soft continuum robots. We demonstrate a meter-scale, 14-DoF cable-driven soft arm capable of trajectory tracking, grasping, and tactile-based stiffness detection. |
|
Annan Zhang, Miguel Flores-Acton, Andy Yu, Anshul Gupta, Maggie Yao, Daniela Rus 2025 International Symposium on Experimental Robotics (ISER) Best Presentation Award at the ICRA 2025 Mechanical Intelligence Workshop Preprint / BibTeX We present a passive robotic fingertip made from a 3D-printed elastomer lattice with embedded air channels for robust tactile sensing. The single-material design supports displacement and force estimation, compliant control, tactile exploration, and withstands high-impact and fatigue testing. |
|
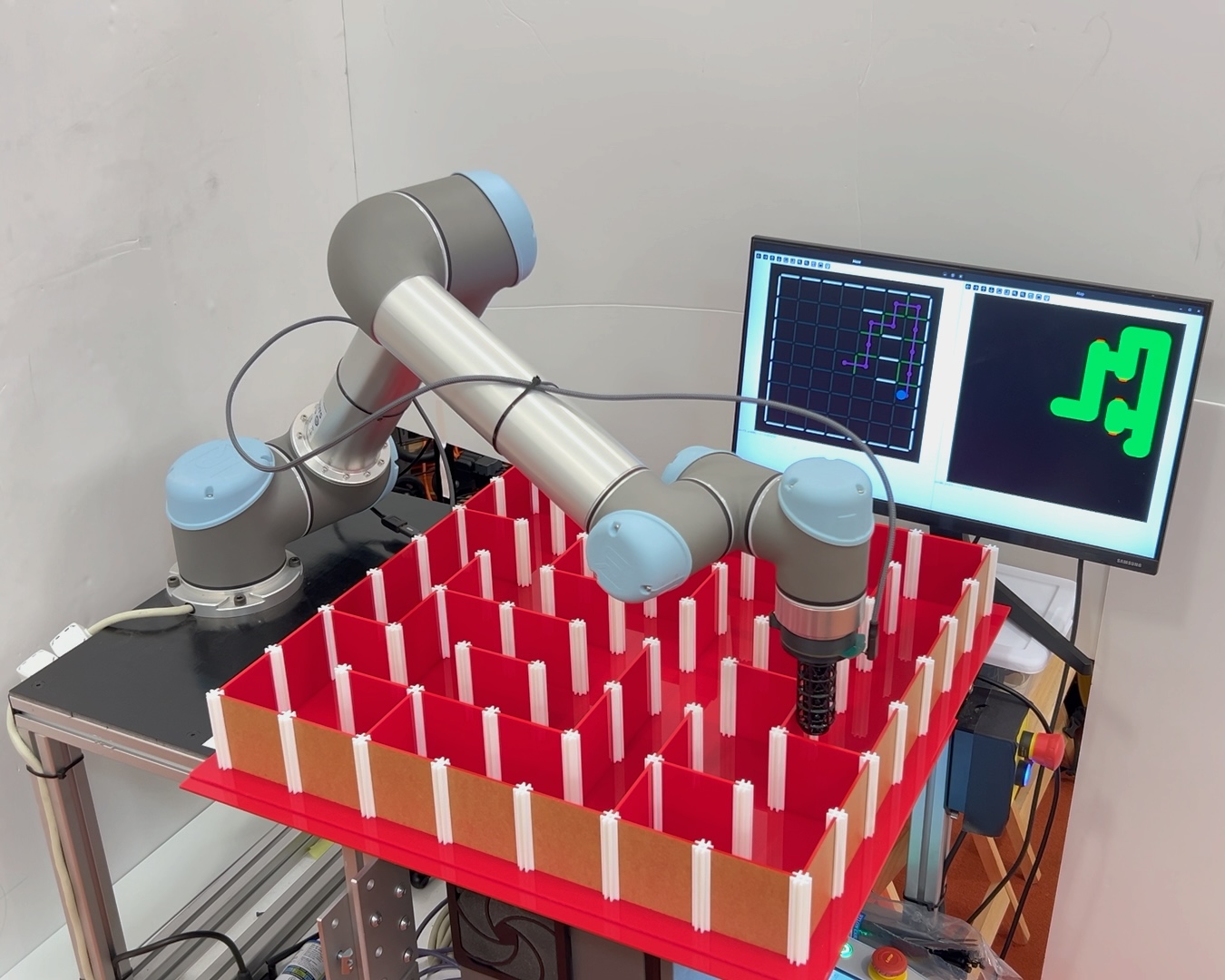
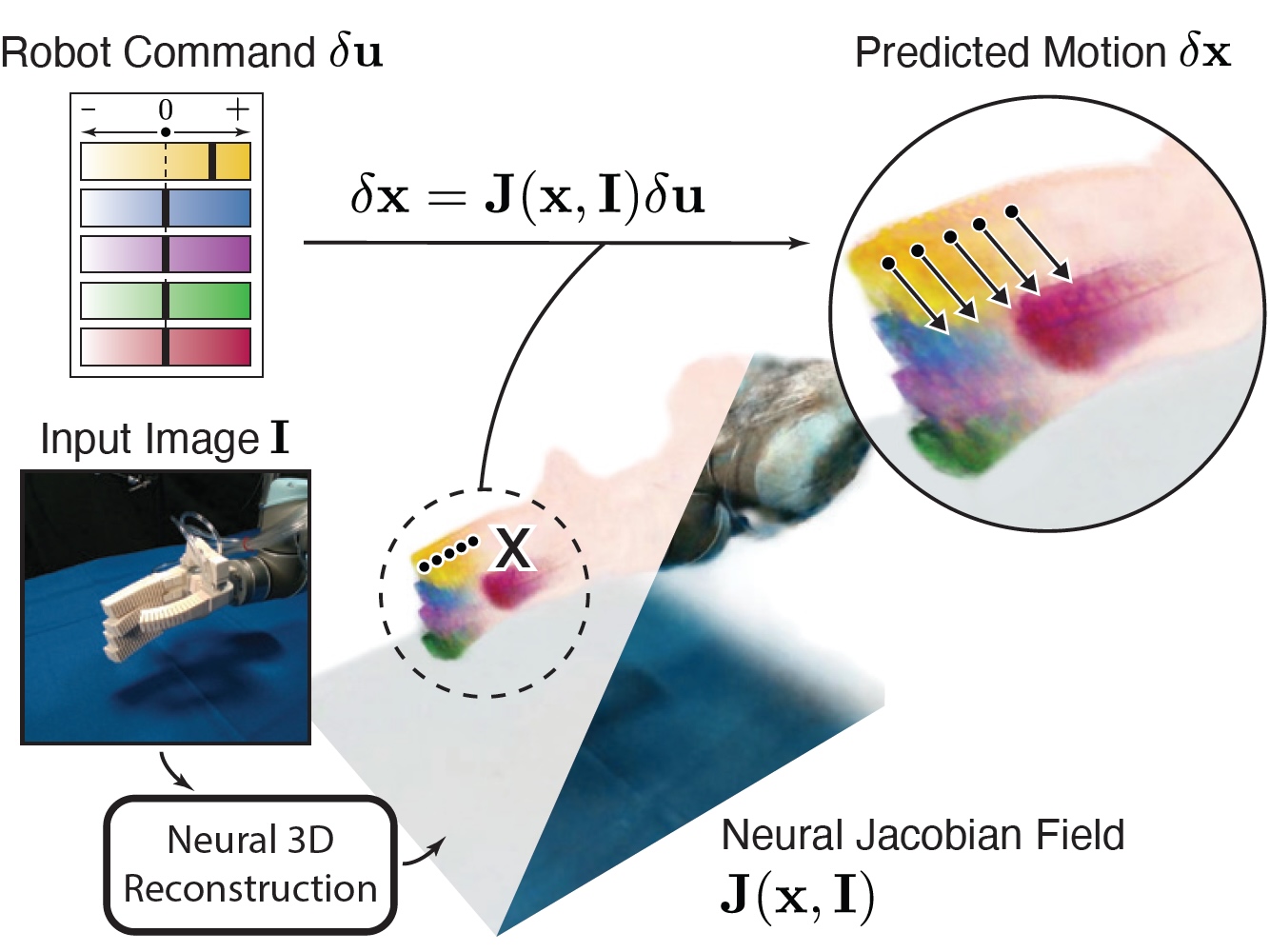
S. Lester Li, Annan Zhang, Boyuan Chen, Hanna Matusik, Chao Liu, Daniela Rus, Vincent Sitzmann Nature, 2025 Paper / BibTeX / Website / Video / Tutorial / Code / Forbes / MIT News We introduce the Neural Jacobian Field, an architecture that learns to control robots by observing the execution of random commands. Our method makes no assumptions about the robots' materials, actuation, or sensing, and enables self-modeling and visuomotor control of unknown robots. |
|
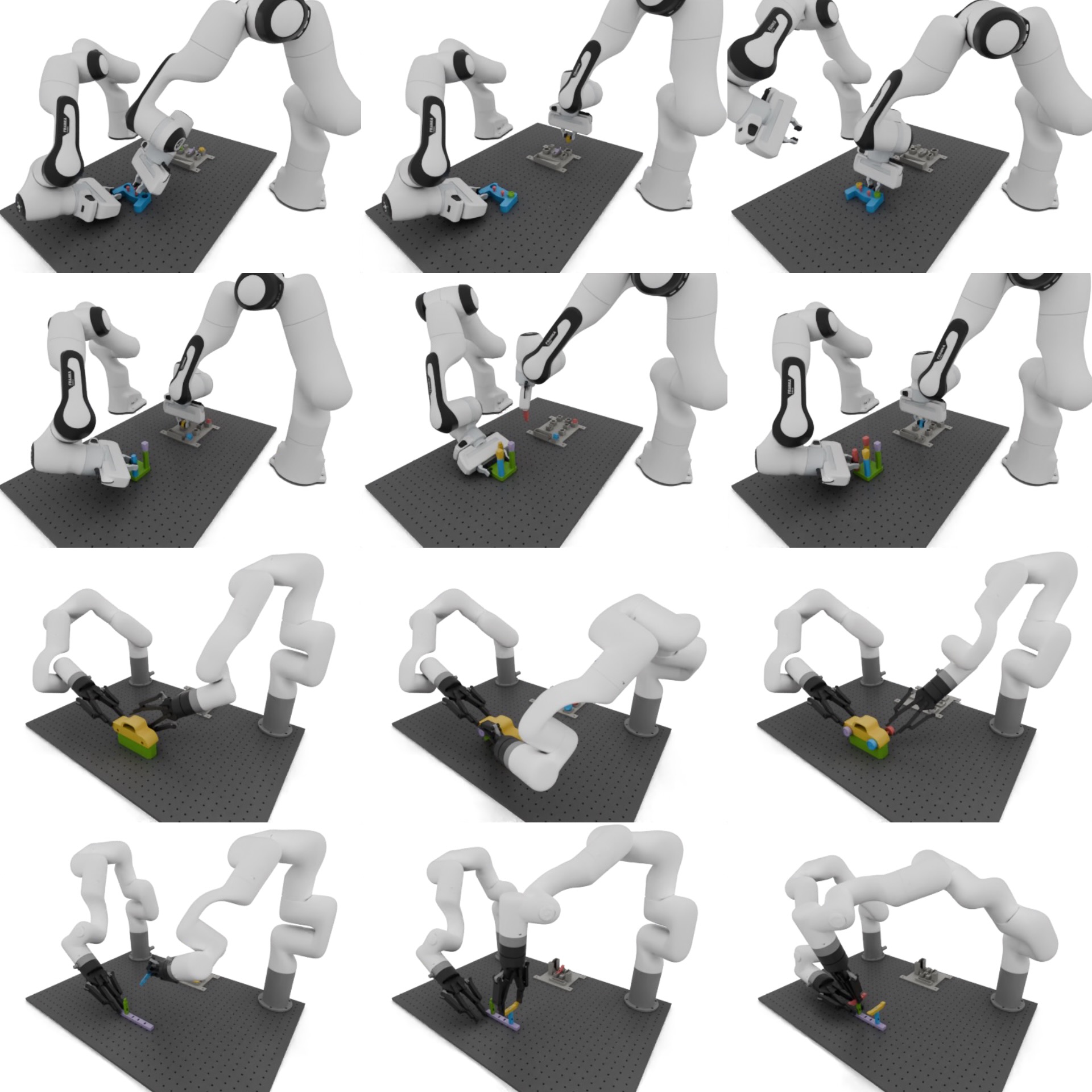
Yunsheng Tian, Joshua Jacob, Yijiang Huang, Jialiang Zhao, Edward Gu, Pingchuan Ma, Annan Zhang, Farhad Javid, Branden Romero, Sachin Chitta, Shinjiro Sueda, Hui Li, Wojciech Matusik 2025 Conference on Robot Learning (CoRL), Best Paper Award Preprint / BibTeX / Website / Video We present a dual-arm robotic system that can autonomously plan and execute multi-step assembly of complex objects. By combining efficient global planning with robust local control through reinforcement learning, our system achieves successful real-world assembly without requiring human demonstrations or domain knowledge. |

|
Annan Zhang*, Lillian Chin*, Daniel L. Tong, Daniela Rus 2024 IEEE International Conference on Robotics and Automation (ICRA) Paper / BibTeX We present a robotic gripper with integrated sensing made from 3D printed elastomer lattices with embedded air channels. Our method simplifies the fabrication process for sensorized grippers and provides sufficient sensor resolutions to reason about grasp location and grasp forces. |

|
Valerie K. Chen*, Lillian Chin*, Jeana Choi*, Annan Zhang*, Daniela Rus 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft) Paper / BibTeX / Video / Forbes / TechCrunch / Popular Science We present a grocery packing robot that can pack a stream of unknown objects on a conveyor belt. By integrating multiple sensing modalities, our system estimates object size and stiffness to avoid damaging packings. |
|
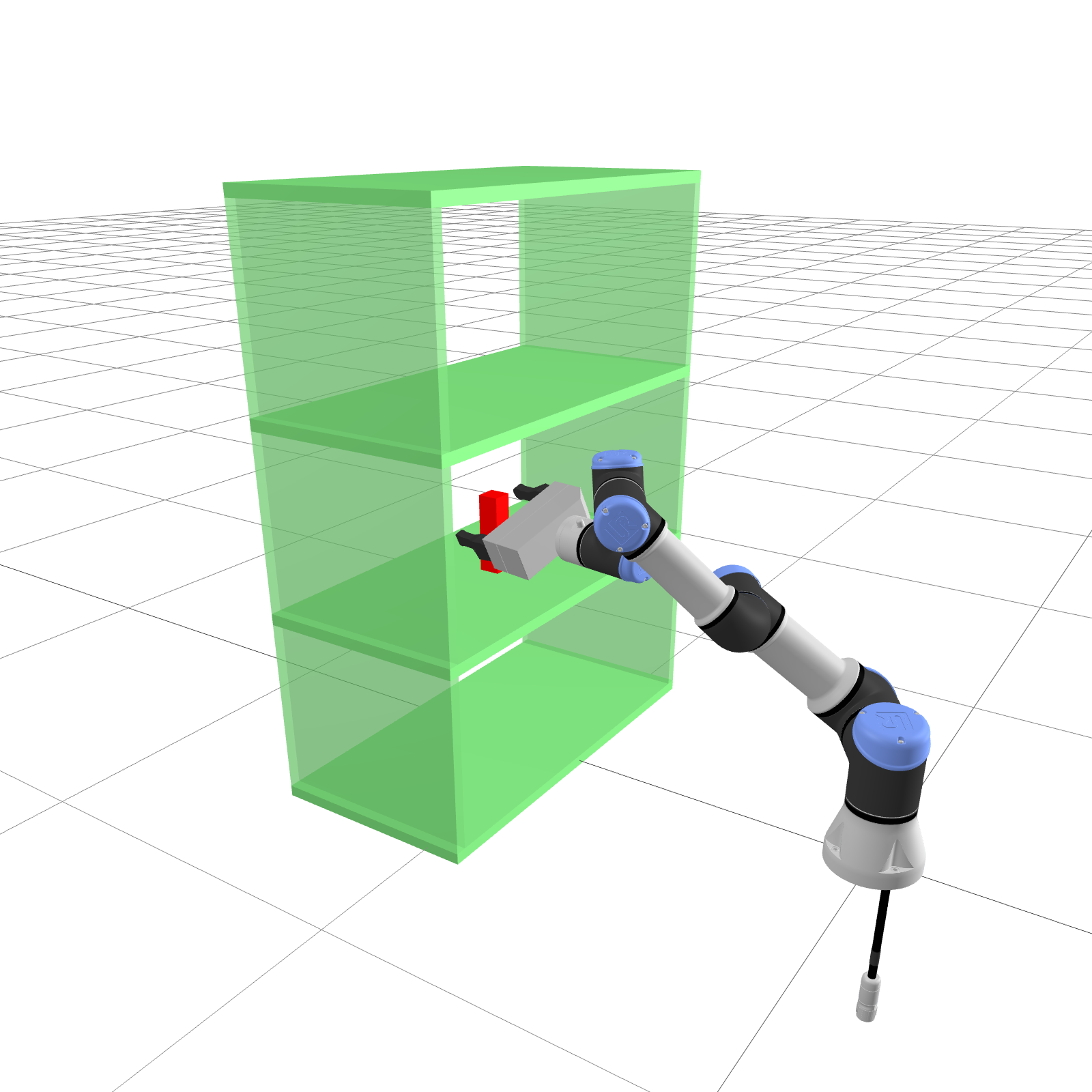
Hongkai Dai*, Alexandre Amice*, Peter Werner, Annan Zhang, Russ Tedrake The International Journal of Robotics Research (IJRR), 2024 Preprint / BibTeX We present a method to generate large collision-free regions in configuration space for sampling- and optimization-based motion planning. We extend the theoretical framework in Amice et al. (2022) and generalize the algorithm to handle algebraic joints and non-polytopic geometries. |

|
Annan Zhang*, Tsun-Hsuan Wang*, Ryan L. Truby, Lillian Chin, Daniela Rus 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Paper / BibTeX Based on experiments on two large soft robotics datasets, we derive best practices for training neural networks that map sensor signals to soft robot shape. |

|
Annan Zhang, Ryan L. Truby, Lillian Chin, Shuguang Li, Daniela Rus IEEE Robotics and Automation Letters (RA-L), 2022 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Paper / BibTeX We use cameras to record the interior of compliant electric actuators and train a neural network that maps the visual feedback to the actuator's tip pose. Our method presents a robust approach for sensorizing hollow-bodied actuators and provides accurate predictions in the presence of external disturbances. |

|
Ryan L. Truby*, Lillian Chin*, Annan Zhang, Daniela Rus Science Advances, 2022 Paper / BibTeX / MIT News / Nature Reviews Materials We embed air-filled channels within architected materials and measure the pressure change during deformation. Our method integrates programmed mechanical behavior, sensing, and actuation and enables sensorized structures for wearables and robotics from one single build material. |

|
Alexandre Amice*, Hongkai Dai*, Peter Werner, Annan Zhang, Russ Tedrake 2022 Workshop on the Algorithmic Foundations of Robotics (WAFR), Best Paper Award Paper / BibTeX / Talk We use convex optimization to generate regions in configuration space that are guaranteed to be collision-free. Our method scales to high-dimensional robot manipulators and paves the way for motion planning with verifiable non-collision. |

|
James Bern, Fatemeh Zargarbashi, Annan Zhang, Josie Hughes, Daniela Rus 2022 IEEE International Conference on Robotics and Automation (ICRA) Paper / BibTeX / Video We present a pipeline to simulate and fabricate cable-driven soft robots with embedded skeletons. These hybrid soft-rigid robots combine the best of both worlds and simultaneously provide strength and robustness. |

|
Annan Zhang, Dirk Mohr International Journal of Plasticity, 2020 Paper / BibTeX We demonstrate how a plasticity model widely used for ductile engineering materials can be learned by a neural network. We deploy the neural network in commercial finite element software and show its capability to correctly predict stresses from strains. |
|
|
|
|
Last updated: March 2026 |